
WING
産総研、新たなヒューマノイド試作機「HRP-5P」開発
ヒューマノイドが航空機を組み立てる日も近い?
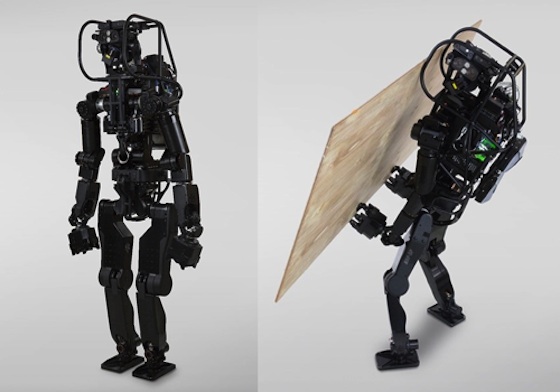
産業技術総合研究所(AIST)が、新たなヒューマノイド試作機「HRP-5P」を開発することに成功した。このヒューマノイド試作機は従来のHRPシリーズの技術を継承しながら、過去最高の身体能力を備えているとのこと。さらに、環境計測・物体認識技術、全身動作計画・制御技術、タスク記述・実行管理技術、高信頼システム化技術からなるロボット知能を搭載することなどによって、大型のモノを運ぶことも可能になった。
「HRP-5P」は大型重量物のハンドリングのほか、搬送が必要な石膏ボード壁面施工を模擬住宅建築現場において「HRP-5P」単体で自律的に遂行することに成功。具体的には、(1)周辺環境の3次元地図生成と物体検出を行って作業台に近づく、(2)作業台に寄りかかりながら平積みされた石膏ボードを1枚ずらして持ち上げる、(3)周辺環境を認識しながら石膏ボードを壁まで搬送する、(4)石膏ボードを降ろして壁に立てかける、(5)高精度ARマーカーを用いて工具を認識して拾い上げる、そして(6)胴縁を握って安定性を確保しながら壁に石膏ボードをビスで固定するといった一連の作業を達成した。大幅に身体能力や性能が向上した「HRP-5P」をベースに、航空機などの大型構造物の組立作業のほか、建築現場などでの実用化に向けた研究開発が加速することが期待できそうだ。
既報のように(本紙2016年6月16日)、産業技術総合研究所ではエアバスおよびフランス国立科学研究センター(CNRS)との間で航空機内組立作業に適用することができるヒューマノイドロボットの共同研究開発を2016年にスタート。3者は産業技術総合研究所内に共同ラボを設置して、2016年から4年間のプロジェクトを展開中だ。
このなかで、航空機内組立作業工程を担うヒューマノイドの研究開発を行うことにしており、航空機のシステム・チェック時に行われるブレーカーの上げ下げの自動化を皮切りに、防水コーティングおよび清掃作業、ネジ締め、さらには各種計器類の取付けといった実作業への適用を視野に入れている。こうした作業は単調な繰り返し作業であったり、あるいは人間の作業者が作業するためには、腰を曲げ続けたり、あるいは手を上げ続けなければならないなど、キツイ作業環境を求められるところヒューマノイドが代替することを検討しており、人間の作業者は、より高度な作業に振り分けるなど、人間とヒューマノイドが協調して作業する現場を生み出すことを目指している。